A Multi-Objective Optimal Design of Low-Impact Development Techniques for Parking Lots in Uljin City, South Korea
ⓒ 2025. KIEAE all rights reserved.
Abstract
This study proposes a sequential optimization approach utilizing a coupled simulation-optimization model to evaluate the performance of low-impact development designs at two parking lots in Uljin City, Korea. The objectives were to reduce runoff volume and remove total suspended solids. Two alternative low-impact development scenarios were designed: one with an individual infiltration trench and the other combining an infiltration trench with a rain garden. First, simulations of individual infiltration trenches were employed to identify the most sensitive parameters and their optimal values. The optimal parameters for the infiltration trench and a set of parameters for the rain garden were simulated to determine the optimal solutions. Moreover, global optimization with one-step simulation was performed to determine the optimal solution. Subsequently, the results of both optimizations were comparatively analyzed.
To achieve these purposes, a coupled set of tools, including SWMM, Pyswmm, and Modefrontier, is used for sequential optimization simulation.
The findings revealed that the most sensitive parameters were inconsistent across different scenarios. The combined scenarios highlight the effectiveness of surface runoff management compared with the individual scenarios. This approach demonstrates that the integrated model is valuable for producing different optimal low-impact development configurations within their parameter ranges. The results showed consistent performance between sequential and global optimization, indicating that sequential optimization is a promising tool for simulating complex combinations of low-impact development techniques. This study also identified four optimal low-impact development configurations for the two parking lots, supporting stakeholders in urban runoff management in similar areas.
Keywords:
Low-Impact Development, Multi-Objective Optimization, Management Train, Sequential Optimization, Global Optimization1. Introduction
Low-impact development (LID) applications are nature-based methodologies for sustainable stormwater management [1]. Since their introduction in the United States in the 1970s, LID applications, including green roofs, rain barrels, permeable pavements, rain gardens (RGs), infiltration trenches (ITs), and bioswales, have been employed extensively in urban stormwater management projects [2,3]. Rapid urbanization has led to the expansion of impervious surfaces, thereby disrupting the infiltration of surface runoff into the ground and causing an ecological imbalance. To address these challenges, LID theory offers practical techniques for mitigating adverse environmental impacts. LID techniques aim to conserve and utilize natural onsite features to manage urban stormwater runoff. The efficacy of LID techniques has been substantiated in several studies. For example, Abdelkebir et al. (2021) conducted a study in Algeria that assessed the performance of LID practices and revealed that these practices could reduce runoff volume by 4.04–76.01% [4]. Additionally, the combined scenarios minimized the runoff volume by up to 75.21%. The adoption of LID practices presents a promising and sustainable approach to urban stormwater control compared with existing drainage systems [5].
Evaluating the performance of LID solutions is critical to ensure that urban environments effectively restore the natural hydrological cycle. The Storm Water Management Model (SWMM) is currently the primary tool used to assess the efficacy of LID practices. Moreover, the integration of the SWMM with other tools, such as MATLAB or optimization algorithms, has become prevalent in evaluating LID performance. For instance, studies have combined the SWMM with a multi-objective optimization model employing various algorithms [6]. The aim of the multi-objective optimization model is to identify the range of optimal solutions, commonly referred to as the trade-off [7]. Several tools have been developed to assess LID performance through multi-objective optimization [8,9,10], suggesting a combination of the SWMM and various optimization algorithms, including the Genetic Algorithm (GA), Non-dominated Sorting Genetic Algorithm II (NSGA-II), and Borg Multi-Objective Evolutionary Algorithm (MOEA), which have been widely applied [11]. For example, Eckart et al. (2018) developed an optimization model using the Borg MOEA coupled with SWMM to determine potential solutions for LID scenarios [12]. Zhang employed an e-NSGA-II algorithm to evaluate and optimize 2,000 LID scenarios in an urbanizing watershed. Based on the non-dominated Pareto front between total cost and water quantity performance, 47 non-dominated solutions were identified [13]. These findings demonstrate that coupled simulation-optimization models are a prevalent tool for evaluating the effectiveness of LID practices in optimizing multiple objectives.
Building on prior research efforts, we propose an optimization framework that effectively addresses the multi-objective optimization of LID designs. This approach considers multiple input variables with parameter ranges and objective functions to reduce the computation time. Sequential optimization was employed to evaluate the LID performance in a parking lot using a coupled simulation-optimization model, SWMM-PySWMM-ModeFRONTIER (MF). MF is an efficient tool for multi-objective optimization, automating the design simulation process and integrating it with a Python script and the SWMM. Herein, two alternative LID control scenarios are proposed. The first scenario applied individual ITs for two parking lots and simulated 30- and 100-year return period rainfall events. The simulation during a short-term rainfall event aimed to assess the IT performance to balance the two objectives during moderate precipitation. Conversely, long-term rainfall event simulations can predict LID performance during extreme rainfall events. When LID practices successfully remove 70–80% of surface runoff during extreme rainfall, it indicates that LID techniques are well-suited for short-term rainfall events. Thus, we identified the optimal LID configuration for both parking lots. The second scenario tested the combined scenarios of the two types of LID controls (IT and RG) under a 100-year return period rainfall event to determine the optimal solution. ITs and RGs are considered integrated systems, referred to as management trains. The management train was simulated using sequential and global optimization simulations in MF to identify sensitive LID parameters and their optimal values.
2. LID and Relevant Studies
Since the 2000s, research on LID has progressed significantly, transitioning from initial investigations centered on specific practices, such as bioretention, permeable pavements, and bioswales, to address the mitigation of urban runoff volumes resulting from increased urbanization. The primary objectives of these studies were to (1) demonstrate the benefits of LID practices through empirical field studies, and (2) explore novel opportunities for LIDs to enhance water quality. During this period, the predominant methodological approaches involved experimental or field methods conducted in real-world projects in the USA [14]. Nearly all projects successfully reduced the runoff volume when implementing individual LID techniques. LID practices in this era, including permeable pavements, RGs, and bioretention cells, are effective in stormwater management [15~19]. Since the 2010s, research has shifted towards integrating the SWMM with optimized multi-objective solutions using optimization algorithms, such as GAs, NSGA-II, Borg MOEA, MOPSO, and NPSO, to evaluate LID performance [20~26]. This approach enabled researchers to establish target values and simulate surface runoff using various alternative scenarios. Since the 2010s, coupled simulation-optimization models have become increasingly prevalent, as summarized in Table 1. These studies have primarily evaluated the performance of individual LIDs, with only a few examining the potential of combining multiple LIDs. Assessing the effectiveness of various LID combinations based on their parameters is a promising avenue for future research.

Summary of the research process on LID techniques
Recent investigations of LID methodologies have markedly advanced the assessment of LID practices. Software simulations have transcended the confines of a single platform and now encompass various software tools utilized within the academic community [27,28]. Current research endeavors focus on stormwater management and pursue cost-effective solutions and the enhancement of stormwater quality [29~31]. Numerous studies have employed multi-scenario approaches to fulfil these diverse objectives, including scenarios devoid of LID implementation, individual LID practices, and combinations of various LID practices simulated under different rainfall event patterns. Such methodologies enable a comprehensive evaluation of LID techniques, ensuring their applicability across various rainfall intensities. For instance, Rezaei et al. (2021) developed a multi-objective optimization model to improve the integration of LID using the SWMM and MOPSO algorithms. This study focused on achieving three primary objectives: (1) reducing runoff volume, (2) enhancing water quality, and (3) minimizing the costs associated with LID facilities [35]. These findings provided quantitative data on the number and combinations of LID practices required to achieve these objectives. Furthermore, the benefits of LID treatment trains have been extensively documented in recent literature [36~38]. Researchers have increasingly integrated multiple LID practices into treatment trains that are sequentially connected systems comprising at least two LID techniques designed to manage stormwater runoff and efficiently remove pollutant loads. For example, Jia et al. examined a treatment train in China, which include bioretention cells, grass swales, infiltration pits, and buffer strips, to evaluate its effectiveness in controlling urban runoff [9]. The results indicated a removal efficiency of 35% for total suspended solids (TSS). Ekmekcioğlu et al. (2021) investigated green roofs, permeable pavements, and bioretention cells and evaluated the combined application of the two most effective LID practices to reduce surface runoff [37]. The treatment train, comprising a green roof and permeable pavement connected in series, demonstrated superior performance relative to individual LID applications (Table 1.). Based on these findings, management training systems are more effective than individual LID practices in reducing runoff and pollution.
Previous research has examined the factors that influence LID performance, including parameter values, size, and location [29]. Numerous studies have explored LID components, sizes, locations, and parameter values using a coupled simulation-optimization model [40]. In a study focused on identifying sensitive LID parameters, Leimgruber et al. demonstrated that the sensitivity of water balance components to LID parameters is crucial for the effective modeling and planning of LID implementation [39]. The authors conducted simulations of various LID configurations, including green roofs, bioretention cells, and ITs, to determine the most influential parameters affecting the water balance. For sensitivity analysis, the open-source Python library SALib was employed. The research utilized datasets comprising 15,000 simulation designs for green roofs and bioretention cells, and 8,000 designs for ITs. Consequently, a robust simulation-optimization model is essential for managing a large simulation design. Several studies on multi-objective optimization have yielded significant results by leveraging PySWMM. However, the integration of MF in evaluating LID performance remains limited. Therefore, this study proposes a sequential optimization approach to identify sensitive LID parameters and optimal solutions using a coupled simulation-optimization model, SWMM–PySWMM-MF. This was followed by an evaluation of the optimal scenarios to balance the multiple objectives.
3. Materials and Methods
3.1. Description of Study Area
Uljin City, situated in North Gyeongsang Province along the eastern coast of South Korea, is shown in Fig. 1 a) and Fig. 1 b). The region experiences a humid temperate climate characterized by hot, humid summers and cold winters, with most of the annual precipitation occurring during the summer months. The average annual rainfall is approximately 1,181.7 mm, which is below the Korean national average. Rainfall data for this study were established using the SCS Type II time-series distribution algorithm based on 30- and 100-year rainfall probability data. The data were modeled using the Korean version of PRISM (Parameter-elevation Regressions on Independent Slope Model) by the Korean Water Resources Management Information System. This study utilized two rainfall scenarios: frequent and extreme rainfall. The 30- and 100-year rainfall for 24 h were 251.3 mm and 305.8 mm, respectively. Time-series rainfall data for a 24-h period are shown in Fig. 1. d).

Study area location and rainfall data
The study area encompassed two parking lots located in the developed region immediately south of the riverside within the Agriculture Complex Center, as depicted in Fig. 1. b) and Fig. 1. c). Previous concrete covered most of the ground surface in the area, which facilitated the accumulation of pollutants [41]. Aryal et al. [42] identified TSS as the predominant contaminant in urban stormwater, with a notable increase in heavy metal concentrations within the TSS in parking areas [43]. Consequently, this study aimed to evaluate the runoff quality by assessing the percentage of TSS removal. Land use at the site comprises approximately 80% impervious surfaces, including car parks, roads, and natural grounds. Furthermore, the soil in the area is primarily classified as a sandy loam with good permeability, which enhances infiltration. Therefore, the two parking lots were deemed suitable for the implementation of LID controls to mitigate the surface runoff and TSS.
3.2. Optimization Procedure
This section outlines the methodological framework of the study, which aims to establish strategic objectives within the study area, and explains the step-by-step process, as illustrated in Fig. 2. The aim of LID design in parking lots is to mitigate surface runoff and enhance runoff quality. The optimal solutions for LID implementation were investigated to achieve a balance between these objectives.
- • Designing LID scenarios: This phase proposes LID techniques for two parking lots, formulating two alternative scenarios: individual and combined LID scenarios, considering the two rainfall events.
- • Setting the LID parameter values: A spectrum of values for each LID input parameter tailored to the context of the study area was specified to ascertain the optimal LID parameters, balancing the two principal objectives.
- • Applying the SWMM to the study area: Based on the key characteristics and rainfall data of the study area, parameters were established to construct a comprehensive site model and simulate runoff and TSS in the SWMM.
- • Developing a coupled-simulation optimization model: An optimization platform incorporating the SWMM software, the PySWMM library, and a MF was developed. A Python script was created for integration with the MF, and objective functions were defined. The pilOPT algorithm was employed to identify the optimal simulation from the Pareto front. At this stage, both sequential optimization with a two-step simulation and global optimization with a one-step simulation were compared for the LID techniques.
- • Assessment of LID performance based on the obtained optimal solutions: The most effective LID designs, selected from the Pareto front based on runoff volume reduction and TSS removal efficiency, were simulated using the SWMM for runoff and TSS. Finally, the optimal LID configuration was selected.

Methodology framework
3.3. LID Controls and Design Scenarios
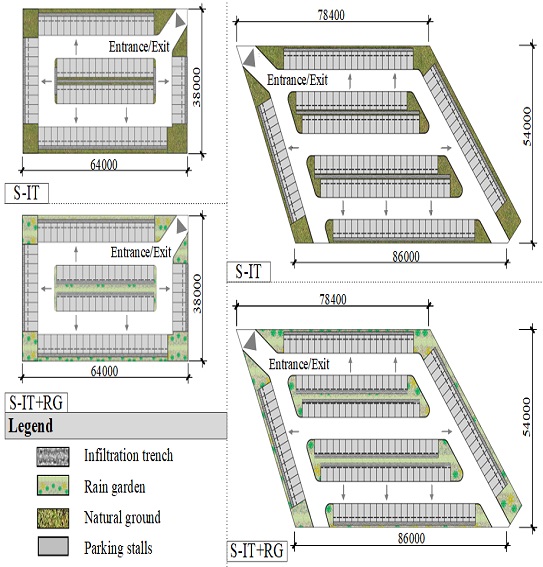
ITs and RGs were selected because of their efficacy in stormwater management [44]. Two alternative scenarios were developed by considering the two rainfall events in this study. Individual LID practices, IT, were implemented in parking lots for test events with 30- and 100-year return periods (S-IT30-P1, S-IT100-P1, S-IT30-P2, and S-IT100-P2). For the management trains, two LID controls, IT and RG, were connected in series (S-IT+RG-Two step and S-IT+RG-One step) and simulated a long-term rainfall event. ITs are arranged along impervious parking areas, covering approximately 10% of the total area of P1 and P2, as shown in Table 2. A geometric IT is typically designed with a rectangular shape and comprises surface and storage layers. A typical IT section is shown in Fig. 3. a). Additionally, the IT configuration should be filled with gravel to create pore spaces and maximize infiltration and storage.
Layout of LID techniques and information of the parking lot

Configuration schematic of LID techniques and detailed component layers
In the management framework, ITs and RGs are consolidated into a unified system. The IT location features a layout analogous to that of the individual IT scenarios. The RG site was established on a corner island and escape island within the parking lot, constituting approximately 15% of the total area. The detailed spatial distribution of the LIDs is presented in Table 2. In this study, a RG was engineered to mitigate surface runoff and remove pollutants. The RG structure comprises surface, soil, and storage layers, as depicted in Fig. 3. b). The vegetation typically includes small trees, wildflowers, and ferns, all of which contribute to its overall volume fraction. The engineered soil media consisted of multiple layers designed to optimize infiltration and nutrient supply for plants. The storage structure incorporates sand and gravel to ensure that runoff is captured and purified before being absorbed into the groundwater. The size of the RG is contingent on the area of the impervious surfaces; thus, the areas of the corner and escape islands in the parking lot of the study area are adequate for designing the RG.
3.4. Setting up LID Parameter Values
The internal configuration of LID practices encompasses the number and characteristics of each layer, which are pivotal in determining storage, infiltration, and filtration capacities during the two rainfall events. Two layers with seven parameters were employed for the ITs, and three layers with 13 parameters were recommended for the RGs. The variation ranges of LID parameters were sourced from credible references and adjusted to align them with the context of the study area. A comprehensive summary of the parameters used for each LID type is presented in Table 3. The surface slopes of IT and RG are based on Luell et al. (2011) and Gu et al. (2018) and have been subsequently adapted for flat terrain in this region [8,45]. Furthermore, the soil porosity, soil conductivity, and soil conductivity slope of the RG were established based on existing soil conditions. When the range of LID parameter values in Table 3. closely aligns with the existing soil properties, it enhances surface runoff management. As indicated in Section 3.1, the soil type in the study area is sandy loam; thus, the value should be adjusted to reflect moderate permeability. Additionally, the storage void ratio and seepage rate of IT and RG were modified to correspond to the moderate permeability of the existing soil, with values set between 0.2 and 0.4 for the storage void ratio, and between 1 and 10 for the seepage rate, as illustrated in Table 3.
Range of parameter values for the selected LID practices
3.5. Multi-Objective Optimization Approach
This study focuses on simulating and optimizing multiple LID parameter values using a sequential optimization methodology. In proposing scenarios for LID practices, SWMM 5.4 was utilized to simulate the quantity and quality of surface runoff within each sub-catchment. The SWMM software features a LID control menu with multiple layers, allowing parameter adjustments to be tailored to specific study areas. Subsequently, the PySWMM library interfaces with SWMM to control and modify the model using Python. In addition, the MF can integrate multiple tools, particularly Python scripts. MF interfaces with Python 3, which is highly compatible with PySWMM, allowing seamless integration with SWMM for multi-objective optimization. By defining the parameter ranges, this study established 1000 simulation designs for each IT scenario during the two rainfall events at P1 and P2. The pilOPT algorithm was employed to identify promising designs while minimizing the number of iterations. Following these simulations, the optimal IT values were applied to the management training for subsequent simulations (Fig. 4.). Furthermore, a global optimization using a one-step simulation of the management train was conducted using various IT and RG parameters. Twenty management train parameters were simulated individually to identify the sensitive parameters and optimal designs. Fig. 4. illustrates the specific value ranges of ITs and RGs for the MF simulation. The objective of this step was to compare the performance of LID practices with that of sequential optimization. A total of 8000 simulations for sequential and global optimizations were conducted to identify the optimal solutions.

Workflow diagram of MF for management train-S-IT+RG with the value range for two-step and one-step simulations
3.6. Sensitivity and Optimization Alternatives Analysis
Following the development of the optimization models, a simulation optimization process was initiated within the MF. MF automates a multitude of simulation designs and sensitivity analyses of the LID parameters. The Design Response Function (DRF) method was implemented in the MF software to evaluate the sensitivity of LID parameters in mitigating runoff volume and TSS removal. The selected DRF method represents a form of global sensitivity analysis that quantifies the effects of each input variable on the outputs in a standardized manner. Subsequently, the MF automatically compared the influence of variables with varying magnitudes and step sizes.
Upon obtaining the comparison table and performance indices, the input parameters with higher rankings (approaching one) were identified as the most influential in terms of total runoff and pollutant loads. Conversely, sensitivity indicators near zero were deemed non-influential parameters. This suggests that variations in the range of values have a significant effect on both objectives. This aggregation ensured that the selected parameter values were congruent with the research objectives. The simulation-by-optimization approach facilitates the identification of influential and non-influential LID practice parameters within a specific context, such as a car park. As previously mentioned, two alternative scenarios were analyzed, each employing a distinct layout of LID practices under two separate rainfall events. These combined scenarios were executed using sequential and global optimization simulations to determine the optimal solution for the two parking facilities. Utilizing 8000 simulation designs, the study derived numerous optimal solutions from the Pareto fronts. The study subsequently identified the optimal values for each scenario in a parking lot by integrating the sensitivity analysis results with the optimal designs. Solutions with nonoptimal values were excluded based on the most sensitive parameters and their optimal values. This elimination process was repeated for the other parameters until only one feasible solution remains. The optimal solutions for each scenario were evaluated using the SWMM.
4. Results and Discussion
4.1. Individual IT Optimization with Short-and Long-Term Rainfall Events
In this context, the IT implementations for the two parking areas were simulated under two rainfall scenarios: S-IT30-P1, S-IT100-P1, S-IT30-P2, and S-IT100-P2. IT implementation must adhere to various design criteria, including structural design and the characteristics of existing soils, to satisfy the infiltration and storage requirements. We evaluated the performance of the IT based on its configuration, which consists of two layers with seven critical parameters aimed at achieving two primary objectives: reducing the surface runoff volume and removing pollutants. The key IT parameters are listed in Table 3. To identify the most sensitive IT parameters, they were programmed in Python using PySWMM and combined with MF to create 4000 viable designs. A sensitivity analysis was performed using the DRF tool in MF based on the optimization results.
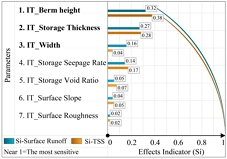
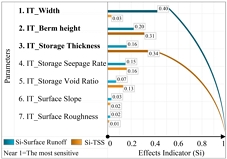
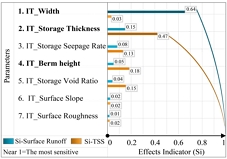
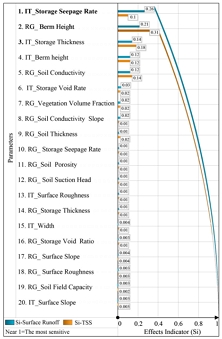
A quantitative sensitivity evaluation of IT parameters was performed. Table 4. lists the sensitivity indicators of seven IT parameters. The sensitivity indices differed between P1 and P2, as well as between short- and long-term rainfall events. In the S-IT30-P1 scenario, the berm height and storage thickness were the most critical parameters for achieving a balance between the two objectives. Conversely, under the S-IT-100-P1 scenario, substantial changes in the effect indicators were observed during long-term rainfall events. Storage thickness was the most sensitive parameter for minimizing runoff volume and TSS, whereas storage width was the second most sensitive parameter, affecting only the reduction in runoff volume. In addition, the berm height and storage seepage rate played moderate roles in balancing the objectives. The variations in the sensitivity indicators at P1 were associated with increased surface runoff volume during the extended rainfall event, indicating that runoff volume influenced the sensitivity of IT parameters.
Sensitivity analysis results for individual scenarios (S-IT); blue shading indicates surface runoff, and yellow indicates TSS. The parameters in bold are the most sensitive
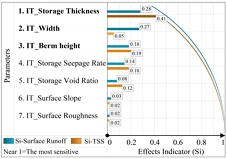
In the S-IT scenarios at P2, the sensitivity of the IT parameters in reducing runoff volume differed from their sensitivity in eliminating the TSS. To minimize runoff volume, width was identified as the most sensitive parameter during both short- and long-term rainfall events, as shown in Table 4. Conversely, the storage thickness was the most critical parameter for TSS removal at P2 during the two rainfall events. The subsequent sensitive parameter for enhancing runoff quality was berm height. As shown in Table 4., the sensitivity indicators of S-IT-100-P2 exhibit marked differences in parameter magnitudes. The sensitivity index for the width and storage thickness was half, whereas the other parameters were below 0.1. This suggests that variations in rainfall data and site conditions significantly affect the sensitivity parameters. Furthermore, the sensitivity indices for the surface slope and surface roughness are minimal across all four scenarios, indicating that these parameters are less crucial to the objectives, as listed in Table 4. The remaining parameters, such as storage void ratio and seepage rate, exerted a moderate influence on both objectives.
Table 4. shows that the four scenarios, each characterized by distinct rainfall data and site conditions, resulted in unique sensitivity indicators. The analysis indicates that width, storage thickness, and berm height are critical parameters for reducing runoff volume and enhancing TSS removal in the two parking lots, consistently emerging as significant factors across all scenarios. These findings are essential for selecting optimal solutions and underscore the importance of concentrating on the most sensitive parameters of various optimal solutions.
For sensitivity analysis, the simulation results obtained using the pilOPT algorithm within the MF are shown in Fig. 5. and Fig. 6. Fig. 5. a) and Fig. 5. b) illustrate a scatter plot of the TSS and surface outflow generated using 2000 viable designs for each rainfall event at P1. To ascertain the optimal IT parameter at P1, two optimal designs were selected from the Pareto-optimal solutions for short- and long-term rainfall events: design ID 97 at S–IT30 and ID 49 at S-IT100. These two optimal solutions resulted in variations in runoff volume reduction and TSS removal. Design ID 97 nearly eliminated the total surface outflow and TSS, whereas design ID 49 demonstrated higher surface outflow and TSS (Fig. 5. a) and Fig. 5. b)). This discrepancy is attributed to design ID 49 under the long-term rainfall scenario, which involved greater precipitation than the short-term simulation for design ID 97.

The optimization results of a single LID at P1; a) Pareto front of S-IT30 at P1; b) Pareto front of S-IT100 at P1; c) optimal values of IT parameter; d) configuration of IT corresponding to the value from c)

The optimization results of a single LID at P2; a) Pareto front of S-IT30 at P2; b) Pareto front of S-IT100 at P2; c) optimal values of IT parameter; d) configuration of IT corresponding to the value from c)
Despite the differing effectiveness of these two optimal solutions in managing surface runoff, the optimal IT parameters consistently exhibit maximum values, as illustrated in Fig. 5. c). Fig. 5. d) shows the geometric size of the IT plotted according to these optimal values.
In the simulation results at P2, the optimal solutions selected from the Pareto front demonstrated the lowest total surface runoff and TSS concentrations among the 2000 simulations (Fig. 6. a) and Fig. 6. b)). Design ID 88 was selected for short-term rainfall, whereas Design ID 52 was recommended for long-term rainfall. The optimal values of the IT parameters were similar for both designs. The geometric dimensions of the IT included a width of 1000 mm, berm height of 150 mm, and storage thickness of 900 mm. Additionally, high values for the layer properties were suggested, including a surface roughness of 0.03, storage void ratio of 0.4, and storage seepage rate of 10 (Fig. 6. c)). Notably, the surface slope value at P2, which was the lowest at 1%, differed from the optimal value at P1. As previously analyzed, the IT surface slope was not the most critical parameter for achieving a balance between the two objectives. Thus, variations in these values do not affect IT performance. The IT configuration values were transferred to the simulation model of the management train for subsequent simulations. The detailed IT parameter values are presented in Fig. 6. c), and Fig. 6. d) shows the physical dimensions of the IT.
4.2. Management Train Optimization with One-and Two-Step Simulations
The simulation results of an individual IT demonstrated its efficacy in reducing runoff volume in scenarios P1, S-IT30-P1, and S-IT100-P1. However, its capacity to remove TSS was insufficient because the TSS remained on the surface in both scenarios. Moreover, IT did not effectively reconcile the dual objectives in scenarios S-IT30-P2 and S-IT100-P2. Consequently, management training incorporating IT+RG was implemented at P1 and P2 to enhance the LID performance and achieve these dual objectives. Following a single IT simulation, non-optimal solutions were eliminated, and optimal IT parameters were employed in a subsequent simulation for management training. This optimization model was executed in a step-by-step manner to assess the sensitivity and evaluate the performance of the LID. Additionally, a global simulation of S-IT+RG was conducted by setting the IT and RG parameter values within specified ranges using the data from Table 3. Finally, sequential and global simulations were compared to identify the sensitive parameters, determine the optimal values, and evaluate the performance of the management train at P1 and P2. The configuration of the management train based on the optimal values is depicted to illustrate the changes in the geometric dimensions and layer properties.
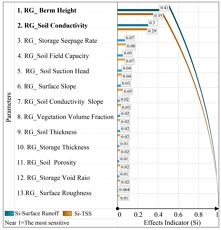
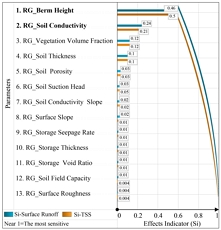
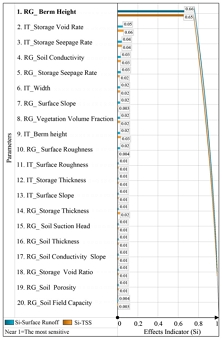
As previously noted, the management train S-IT+RG underwent a second simulation involving 13 RG parameters, whereas S-IT+RG with a global simulation encompassed 20 parameters from both IT and RG. Each parameter was subjected to sensitivity analysis. Table 5. presents the sensitivity indicators ranked from most to least impactful on the two objectives across all scenarios at P1 and P2. According to Table 5., the sensitivity indicators for the two-step simulation remain consistent for P1 and P2. Berm height and soil conductivity of the RG were identified as the most sensitive factors for controlling surface runoff, with sensitivity indices ranging from 0.21 to 0.46. The indices for the other parameters were relatively small, all below 0.12, but became noticeable as the storage thickness of the RG exhibited low sensitivity to runoff management. Conversely, IT storage thickness in individual IT scenarios had the most significant impact on runoff control. As indicated in Table 5., the surface roughness of RG is not an important parameter influencing S-IT+RG during the second optimization simulation, as its variation range suggests that it does not have a substantial impact on performance.
Sensitivity analysis results for management train (S-IT+RG); blue shading represents surface runoff, and yellow represents the TSS. The parameters in bold are the most sensitive
In the global optimization process employing a one-step simulation, 20 parameters of the entire management train were optimized using the MF. The sensitivity index exhibited a significant variation in magnitude between scenarios at P1 and P2. In the S-IT+RG scenario with a one-step simulation at P1, the berm height of RG substantially affected reducing runoff volume and TSS removal, achieving a peak value of 0.6. In contrast, the other 19 parameters had markedly lower values, all under 0.05. The berm height of the RG was highly sensitive to reductions in the runoff volume and TSS at P1, a small area, whereas the other parameters showed minor sensitivity to the management train's performance. In the S-IT+RG scenario with a one-step simulation at P2, the sensitivity indicators were distributed among the storage seepage rate of IT, berm height of RG, storage thickness, berm height of IT, and soil conductivity of RG. Among these five parameters, the RG berm height remained highly sensitive to TSS removal and relatively sensitive to surface runoff reduction following the storage seepage rate of IT, which was identified as a highly influential parameter for reducing the surface runoff volume at P2. Storage thickness, berm height of the IT, and soil conductivity of the RG exhibited moderate sensitivity. In contrast, the other parameters had almost no effect on the performance of the management train. In summary, sequential and global simulations revealed notable variations in the sensitivity of the LID parameters across different simulation methods.
Fig. 7. presents the results of 1000 viable solutions obtained from the second simulation in the sequential optimization process at P1. The optimal solutions were selected for the Pareto front cases. As shown in Fig. 7. a), nearly optimal solutions achieve zero for the total surface area and TSS outflow. Fig. 7. b) illustrates the optimal IT and RG values for these solutions. As previously analyzed, the most sensitive parameters significantly influence the performance of the management train. In this context, when the two objectives are minimized and the IT parameters are held constant, the recommended optimal RG values are maximized and aligned with the ranking of the most sensitive parameters. The two most sensitive RG parameters, the berm height and soil conductivity, were recommended to be at their maximum values within the ranges of 0–300mm and 5–20mm/h, respectively. As the other parameters had a minor effect on the performance of the management train, their optimal values were suggested to maintain a balance between the two objectives, as depicted in Fig. 7. c). This indicates that the optimal RG value was calculated for a combination with a fixed IT configuration to ensure a balance between two objectives.

Results of the sequential optimization (two-step simulation) at P1; a) Pareto front of S-IT+RG for two-step simulation; b) optimal values of IT and RG parameters; c) configuration of combination scenarios according to the value from b)
Fig. 8. shows an alternative configuration achieved through global optimization via a single-step simulation at P1. The optimal IT values were adjusted to correspond to the storage thickness and surface slope. As shown in Fig. 8. b), the IT storage thickness is established at 300mm with a surface slope of 1%, whereas the other IT parameters remain largely consistent with those from the two-step simulation. Notably, the optimal RG value exhibited significant variations in the configuration. The thickness of the soil layer was 500mm, and the field capacity was 0.1. In contrast, the two-step simulation featured a soil thickness of 150mm and a field capacity of 0.2. As the layer thickness increased, the field capacity decreased. Furthermore, the optimal values for the soil conductivity slope and soil suction head were reduced to 6 and 30, respectively, highlighting the relationship between soil thickness and its properties in managing surface runoff. With respect to the storage layer, the optimal RG values indicated changes in the storage thickness, void ratio, and seepage rate when compared with the two-step simulation. As shown in Fig. 8. c), the storage thickness and void ratio are 550mm and 0.2, respectively, whereas the two-step simulation has a storage thickness of 300mm and void ratio of 0.4. The storage void ratio reflects the runoff storage capacity, with a higher value indicating more available void space for runoff. These findings suggest that, as the storage thickness increases, the void ratio decreases, thereby ensuring the performance of the management train. The geometric dimensions and layer properties of LID practices demonstrated a correlation under the constraint value to balance two objectives: (1) reducing the surface runoff volume and (2) removing the TSS in the management train.

Results of global optimization (with one-step simulation) at P1; a) Pareto front of S-IT+RG for one-step simulation; b) optimal values of IT and RG parameters; c) configuration of combination scenarios according to the value from b)
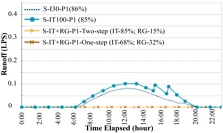
After the optimization simulation process, we performed hydraulic and water quality evaluation for four scenarios in the SWMM. Table 6. compares the runoff and TSS discharge over time of S-IT scenarios with S-IT+RG scenarios at P1. Concerning surface runoff (Table 6. a1)),the performance of four scenarios was effective for both short-and long-term rainfall events. Individual IT scenarios resulted in anapproximately 85% decrease in the total surface runoff volume,while the S-IT+RG scenarios achieved a complete reduction in runoff volume. These values achieve more than 80% of the suggested reduction target and can be regarded as good performance. Although S-IT+RG scenarios have the best performance on surface runoff management, the contribution of individual components within the management train of S-IT+RG differs under the two simulation processes. Recommended configuration of IT in the two-step simulation is larger than that in the one-step simulation, so the contribution of IT reaches up to 90% of the flow reduction, whereas S-IT with one-step simulation contributed 68%, and the remaining performance (32%) is attributed to RG. With the higher contribution of IT for stormwater management, IT configuration can suggest the appropriate solution at P1. However, it should be noted that both objectives are important targets. The inefficient TSS pollutant removal capacity is found in the S-IT scenarios. Therefore, RGs are incorporated into the design to eliminate TSS. Table 6. a2) shows the pollutant removal (TSS)capacity among four scenarios. S-IT scenarios did not achieve a complete 100% effective reduction in the TSS, where the management train S-IT+RG exhibited exceptional performance, achieving complete removal of TSS. These SWMM simulation results were in good agreement with the MFsimulation,which can be regarded as an optimal solution for P1.
Comparison of time-series runoff volume and TSS at parking lot 1: a1-Runoff (LPS);a2 - TSS (mg/l)
The configuration of the management train at P2 differed from that of S-IT+RG at P1. To identify modifications to the management train setup, sequential optimization followed by a secondary simulation was initially performed at P2. Subsequently, global optimization utilizing a one-step simulation was implemented. Fig. 9. shows the optimal solution among 1000 viable solutions from the Pareto front. Design ID 901 was determined to be the most effective solution for achieving a balance between the two objectives. The optimal values for ID 901 are depicted in Fig. 9. b). The management train configuration exhibited a significant increase in RG size, characterized by a berm height of 300 mm, soil thickness of 500 mm, and storage thickness of 900 mm. In addition, the properties of the RG layer demonstrated different parameter ranges. As illustrated in Fig. 9. b), the vegetation volume fraction, surface slope, soil field capacity, soil conductivity slope, and storage ratio were minimized within the range of the values. Conversely, the surface roughness, soil porosity, soil conductivity, soil suction head, and storage seepage rate were maximized. As previously indicated, these RG parameters are not the most sensitive to the effectiveness of management training. Therefore, the adjusted values were intended to strike a balance between these two objectives.

Results of the sequential optimization (two-step simulation) at P2; a) Pareto front of S-IT+RG for two-step simulation; b) optimal values of IT and RG parameters; c) configuration of combination scenarios according to the value from b)
Fig. 10. illustrates optimal design ID 735 at P2, achieved through global optimization using a single simulation step. To ensure that the management train performs well at P2, IT configurations with the largest geometric dimensions and ideal layer properties are recommended, as depicted in Fig. 10. c). Notably, the IT configuration remained unchanged in the two-step simulation. However, the RG configuration was slightly modified with respect to the geometric size and media properties of the storage layer. As shown in Fig. 10. b) and Fig. 10. c), the storage thickness of the RG is reduced to 300 mm, indicating that the storage void ratio reaches its maximum value between 0.2 and 0.4. In contrast, the storage thickness of RG in the two-step simulation is 900 mm with a storage void ratio of 0.2. Referring to the sensitivity analysis in Section 4.2.1, the most sensitive parameters were prioritized by selecting the highest values and designing a suitable LID configuration to balance the two objectives.

Results of global optimization (with one-step simulation) at P2; a) Pareto front of S-IT+RG for one-step simulation; b) optimal values of IT and RG parameters; c) configuration of combination scenarios according to the value from b)
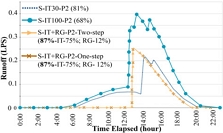
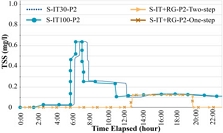
In contrast to the performance of scenarios at P1, the percentage reduction in hydrologic volume and water quality varies significantly across four scenarios (S-IT and S-IT+RG scenarios). For S-IT30 scenarios, the percentage reduction of surface runoff volume is 81%, whereas S-IT100 decreases by 68% under 100 return rainfall, as shown in Table 7. b1). An individual IT proved ineffective in managing surface runoff during the long-term rainfall event, representing the extreme rainfall scenario. The reduced performance of S-IT occurs because more rainfall results in a larger runoff volume, which increases the volume routed to the IT. Additionally, the flow peak at S-IT100-P2 was four times higher than at S-IT100-P1, indicating the need for improved LID practices at P2. The effectiveness of stormwater management in S-IT+RG scenarios was consistently achieved between the two simulation processes. Notably, the flow peak at P2 was halved compared with the individual IT-S-IT100, as shown in Table 7. b1). Similar to S-IT+RG scenarios at P1, the effectiveness in TSS removal capacity achieves 100% compared with the S-IT, as seen in Table 7. b2).These results demonstrate that the management train S-IT+RG performed the best and remained consistent across the two simulation processes, reducing runoff volume by 87% and achieving complete TSS removal within 20 hours. These findings support earlier analyses and suggest that the management train has improved surface runoff management across all rainfall events.
Comparison of time-series runoff volume and TSS at parking lot 2: b1-Runoff(LPS);b2 - TSS (mg/l)
In short, Fig. 7. c), Fig. 8. c), Fig. 9. c), and Fig. 10. c) show the LID configurations at P1 and P2, optimized for their respective scenarios. The geometric dimensions and layer characteristics of the IT and RG were proposed within various ranges of value to find a balance between the two objectives. Both sequential (two-step simulation) and global (one-step simulation) optimization consider the relationship between the geometric dimensions and layer characteristics of LID practices, which are expected to improve LID performance, demonstrating a successful integrated simulation optimization model. Although both sequential (two-step simulation) and global (one-step simulation) optimization are recommended for different LID configurations, their effectiveness in balancing these objectives is similar. The global optimization process, which uses a single-step simulation of the entire management train, has limitations when dealing with a more complex management train. Conversely, sequential optimization has become a promising approach for simulating management trains because it eliminates non-optimal solutions at each stage, simplifying subsequent simulations and allowing the assessment of the performance of individual components within the management train.
5. Conclusions
This study presents a sequential optimization methodology that employs a two-step simulation to manage train operations, identify the most influential parameters, and determine the optimal IT and RG values within a specified parameter range. The aim was to minimize the total runoff volume and enhance the TSS removal at the two parking lots. Initially, an individual IT was modeled using SWMM under short- and long-term rainfall conditions. The sensitivity of the parameter and its optimal value were identified by integrating the Python and MF software. Subsequently, the optimal IT value was applied to the LID combination scenarios in the second phase. In addition, a global optimization with a single-step simulation was conducted to identify the best solutions. MF, which uses the pilOPT algorithm, generated numerous optimal solutions with varying configurations. Finally, these optimal solutions were comparatively analyzed using the SWMM to evaluate the performance of each scenario and compare the outcomes of the two-step and one-step simulations.
Based on the simulation and evaluation outcomes, the following conclusions can be drawn:
- 1) The sensitive parameters of LID practices identified through the MF simulation were influenced by rainfall data, site conditions, and the quantity of LID practices. Variations in LID scenarios, rainfall events, and study area characteristics led to significant changes in the sensitivity indicators of LID parameters.
- 2) The optimal IT and RG values derived from the Pareto front varied in size and layer properties for each optimal solution. The MF adjusted the LID configuration values to achieve a balance among multiple objectives.
- 3) The management train S-IT+RG demonstrated greater effectiveness than the individual S-IT in reducing surface runoff volume and TSS removal; thus, the management train configurations are recommended as optimal solutions for P1 and P2 to manage surface runoff.
- 4) The integrated SWMM-PySWMM-MF model successfully designed multiple optimal solutions while considering various objectives. The performances of these optimal solutions, obtained from sequential and global optimization simulations, aligned with the SWMM simulation results, confirming the feasibility and reliability of the model. Furthermore, the main benefit of the integrated model is that PySWMM is an open-source library, providing Python access to the SWMM data model. PySWMM allows for the direct extraction of simulation results, including total runoff and pollutant loads from SWMM. Control algorithms can now be developed entirely in Python, enabling users to create scripts tailored to their study goals.
This research aimed to develop a methodological framework for the optimal design of LID configurations by employing a combined simulation-optimization model that integrates SWMM-PySWMM-MF. The focus was on variations in the LID parameters. The sequential optimization simulation capability facilitates the elimination of suboptimal solutions at each stage, thereby providing an optimal solution for subsequent simulations to form an efficient management train. This study includes a simulation and evaluation that demonstrates the practicality of sequential optimization for train management utilizing two distinct LID techniques (S-IT+RG) in two parking lots. In future studies, the developed model with sequential optimization will be expanded to incorporate more than two LID techniques over a larger study area.
Acknowledgments
This work wa supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (RS-2022-NR0700437).
References
-
L.M. Ahiablame, B.A. Engel, I. Chaubey, Effectiveness of low impact development practices in two urbanized watersheds: Retrofitting with rain barrel/cistern and porous pavement, Journal of Environmental Management, 119, 2013, pp.151-161.
[https://doi.org/10.1016/j.jenvman.2013.01.019]

- Manual, D. Yakima Regional, 2011.
-
S. Kumar et al., Multi-objective optimization for stormwater management by green-roofs and infiltration trenches to reduce urban flooding in central Delhi, Journal of Hydrology, 606, 2022, 127455.
[https://doi.org/10.1016/j.jhydrol.2022.127455]
-
B. Abdelkebir et al., Evaluating Low-Impact Development practice performance to reduce runoff volume in an urban watershed in Algeria, Arabian Journal of Geosciences, 14(9), 2021, 814.
[https://doi.org/10.1007/s12517-021-07178-0]
-
W. Yang et al., Measuring performance of low impact development practices for the surface runoff management, Environmental Science and Ecotechnology, 1, 2020, 100010.
[https://doi.org/10.1016/j.ese.2020.100010]
-
K. Javan et al., Coupled SWMM-MOEA/D for multi-objective optimization of low impact development in urban stormwater systems, Journal of Hydrology, 656, 2025, 133044.
[https://doi.org/10.1016/j.jhydrol.2025.133044]
-
D. Minh Hai, Optimal planning of low-impact development for TSS Control in the upper area of the Cau Bay River basin, Vietnam, Water, 12(2), 2020, 533.
[https://doi.org/10.3390/w12020533]
-
S. K. Luell, W.F. Hunt, R.J. Winston, Evaluation of undersized bioretention stormwater control measures for treatment of highway bridge deck runoff, Water Science and Technology, 64(4), 2011, pp.974-979.
[https://doi.org/10.2166/wst.2011.736]
-
H. Jia et al., Field monitoring of a LID-BMP treatment train system in China, Environmental Monitoring and Assessment, 187, 2015, pp.1-18.
[https://doi.org/10.1007/s10661-015-4595-2]
-
J.H. Lee, H.W. Kim, Analysis of stormwater runoff reduction effect through applying low impact development practices in a flood prone area: Case of Incheon, South Korea, The Korea Spatial Planning Review, 102, 2019, pp.49-67.
[https://doi.org/10.15793/kspr.2019.102..004]
-
J.J. Huang et al., The optimization of low impact development placement considering life cycle cost using genetic algorithm, Journal of Environmental Management, 309, 2022, 114700.
[https://doi.org/10.1016/j.jenvman.2022.114700]
-
K. Eckart, Z. McPhee, T. Bolisetti, Multiobjective optimization of low impact development stormwater controls, Journal of Hydrology, 562, 2018, pp.564-576.
[https://doi.org/10.1016/j.jhydrol.2018.04.068]
- G. Zhang, M. J. Hamlett, P. Reed, Multi-objective optimization of low impact development scenarios in an urbanizing watershed, In Proceedings of the AWRA annual conference, Baltimore, Usa, 2006 pp.1-7.
-
M.E. Dietz, Low impact development practices: Review current research and recommendations for future directions, Water, air, and soil pollution, 186, 2007, pp.351-363.
[https://doi.org/10.1007/s11270-007-9484-z]
-
C. Pagotto, M. Legret, P. Le Cloirec, Comparison of the hydraulic behaviour and the quality of highway runoff water according to the type of pavement, Water Research, 34(18), 2000, pp.4446-4454.
[https://doi.org/10.1016/S0043-1354(00)00221-9]
-
A.P. Davis et al., Water quality improvement through bioretention: Lead, copper, and zinc removal, Water Environment Research, 75(1), 2003, pp.73-82.
[https://doi.org/10.2175/106143003X140854]
-
A. P. Davis, Field performance of bioretention: Hydrology impacts, Journal of Hydrologic Engineering, 13(2), 2008, pp.90-95.
[https://doi.org/10.1061/(ASCE)1084-0699(2008)13:2(90)]
-
M.E. Dietz, J.C. Clausen, A field evaluation of rain garden flow and pollutant treatment, Water, Air, and Soil Pollution, 167, 2005, pp.123-138.
[https://doi.org/10.1007/s11270-005-8266-8]
-
E.Z. Bean, W.F. Hunt, D.A. Bidelspach, Field survey of permeable pavement surface infiltration rates, Journal of Irrigation and Drainage Engineering, 133(3), 2007, pp.249-255.
[https://doi.org/10.1061/(ASCE)0733-9437(2007)133:3(249)]
-
S. Oracei Zare, B. Saghafian, A. Shamsai, Multi-objective optimization for combined quality–quantity urban runoff control, Hydrology and Earth System Sciences, 16(12), 2012, pp.4531-4542.
[https://doi.org/10.5194/hess-16-4531-2012]
-
R.A. Brown, D.E. Line, W.F. Hunt, LID treatment train: Pervious concrete with subsurface storage in series with bioretention and care with seasonal high water tables, Journal of Environmental Engineering, 138(6), 2012, pp.689-697.
[https://doi.org/10.1061/(ASCE)EE.1943-7870.0000506]
-
H.P. Qin, Z.X. Li, G. Fu, The effects of low impact development on urban flooding under different rainfall characteristics, Journal of environmental management, 129, 2013, pp.577-585.
[https://doi.org/10.1016/j.jenvman.2013.08.026]
-
H. Jia et al., LID-BMPs planning for urban runoff control and the case study in China, Journal of Environmental Management, 149, 2015, pp.65-76.
[https://doi.org/10.1016/j.jenvman.2014.10.003]
-
S.S. Baek et al., Optimizing low impact development (LID) for stormwater runoff treatment in urban areas, Korea: Experimental and modeling approach, Water Research, 86, 2015, pp.122-131.
[https://doi.org/10.1016/j.watres.2015.08.038]
-
A.S. Braswell, A.R. Anderson, W.F. Hunt, Hydrologic and water quality evaluation of a permeable pavement and biofiltration device in series, Water, 10(1), 2018, 33.
[https://doi.org/10.3390/w10010033]
-
Y. Bai et al., Comprehensive performance evaluation system based on environmental and economic benefits for optimal allocation of LID facilities, Water, 11(2), 2019, 341.
[https://doi.org/10.3390/w11020341]
-
R.A. Frias, M. Maniquiz-Redillas, Modelling the applicability of low impact development (LID) technologies in a university campus in the philippines using storm water management model (SWMM). In IOP Conference Series: Materials Science and Engineering, Vol. 1153, No. 1, 2021, 012009).
[https://doi.org/10.1088/1757-899X/1153/1/012009]
- A.H. Nazari, A. Roozbahani, S.M. Hashemy Shaddany, Urban stormwater management by optimizing low impact development techniques and integration of SWMM and SUSTAIN models, Journal of Water and Wastewater; Ab va Fazilab (in persian), 32(4), 2021, pp.136-151.
-
Z. Wang et al., Impact of spatial discretization resolution on the hydrological performance of layout optimization of LID practices, Journal of Hydrology, 612, 2022, 128113.
[https://doi.org/10.1016/j.jhydrol.2022.128113]
-
F. Dong et al., Towards efficient Low Impact Development: A multi-scale simulation-optimization approach for nutrient removal at the urban watershed, Journal of cleaner production, 269, 2020, 122295.
[https://doi.org/10.1016/j.jclepro.2020.122295]
- Y. Yu, LID modeling and optimization at single unit and neighborhood scale, Master's thesis, University of Alberta, 2022.
-
B.J. de Oliveira Sousa et al., Low-impact development scenarios in terms of construction costs and runoff reduction, Journal of Hydrologic Engineering, 29(1), 2023, pp.1-8.
[https://doi.org/10.1061/JHYEFF.HEENG-6059]
-
X. Sui, F.H.m. van de Ven, The influence of low impact development (LID) on basin runoff in a half-urbanized catchment: A case study in San Antonio, Texas, Journal of Hydrology, 616, 2023, 128793.
[https://doi.org/10.1016/j.jhydrol.2022.128793]
-
M. Wang et al., Integrating carbon and water footprint into nature-based solution (NBS) for urban planning in a highly built-up area in Guangzhou, China, Science of The Total Environment, 951, 2024, 175505.
[https://doi.org/10.1016/j.scitotenv.2024.175505]
-
A.R. Rezaei et al., Optimal implementation of low impact development for urban stormwater quantity and quality control using multi-objective optimization, Environmental monitoring and assessment, 193(4), 2021, 241.
[https://doi.org/10.1007/s10661-021-09010-4]
-
Y. Abduljaleel, Y. Demissie, Evaluation and optimization of low-impact development designs for sustainable stormwater management in a changing climate, Water, 13(20), 2021, 2889.
[https://doi.org/10.3390/w13202889]
-
O. Ekmekcioğlu et al., Investigation of the low impact development strategies for highly urbanized area via auto-calibrated storm water management model (SWMM), Water Science and Technology, 84(9), 2021, pp.2194-2213.
[https://doi.org/10.2166/wst.2021.432]
-
A. Nazari, A. Roozbahani, S.M. Hashemy Shahdany, Integrated SUSTAIN-SWMM-MCDM approach for optimal selection of LID practices in urban stormwater systems, Water Resources Management, 37(9), 2023, pp.3769-3793.
[https://doi.org/10.1007/s11269-023-03526-9]
-
J. Leimgruber et al., Sensitivity of model-based water balance to low impact development parameters, Water, 10(12), 2018, 1838.
[https://doi.org/10.3390/w10121838]
-
B. Yang et al., Optimal designs of LID based on LID experiments and SWMM for a small-scale community in Tianjin, north China, Journal of Environmental Management, 334, 2023, 117442.
[https://doi.org/10.1016/j.jenvman.2023.117442]
-
A. Azad, M.N. Sheikh, F.I. Hai, A critical review of the mechanisms, factors, and performance of pervious concrete to remove contaminants from stormwater runoff, Water Research, 251, 2024, 121101.
[https://doi.org/10.1016/j.watres.2024.121101]
-
R. Aryal et al., Urban stormwater quality and treatment, Korean Journal of Chemical Engineering, 27, 2010, pp.1343-1359.
[https://doi.org/10.1007/s11814-010-0387-0]
-
J.H. Lee, K.W. Bang, Characterization of urban stormwater runoff. Water Research, 34(6), 2000, pp.1773-1780.
[https://doi.org/10.1016/S0043-1354(99)00325-5]
- U. EPA, L. Center, Low impact development (LID): A literature review. US Environmental Protection Agency: Washington, DC, USA, 2000.
-
J. Gu et al., The impact of uncertainty factors on optimal sizing and costs of low-impact development: A case study from Beijing, China, Water Resources Management, 32, 2018, pp.4217-4238.
[https://doi.org/10.1007/s11269-018-2040-3]
-
J.L. Li, W. Che, Non-piont source pollution and stormwater management practices of parking lot. In 2011 International Conference on Remote Sensing, Environment and Transportation Engineering IEEE, 2011, pp. 499-502.
[https://doi.org/10.1109/RSETE.2011.5964323]
-
A. Wałęga, M. Cebulska, W. Gądek, The use of bioretention cell to decreasing outflow from parking lot, Journal of Water and Land Development, 36(1), 2018, pp.173-181.
[https://doi.org/10.2478/jwld-2018-0017]